
I am a Ph.D. student in Robotics at the Georgia Institute of Technology. My research is to develop efficient SLAM algorithms for robot autonomy.
Before pursuing my Ph.D., I worked in the Autonomous Driving industry for several years, where I gained extensive experience in leading software engineering efforts and fostering collaboration within cross-functional teams. My contributions spanned multiple advanced projects, including sensor extrinsic and intrinsic calibration, LiDAR-based mapping, visual feature-based mapping and localization, monocular visual-inertial odometry, and Semantic SLAM. These projects were primarily focused on highway scenarios and autonomous valet parking systems, where SLAM accuracy and robustness were critical.
This combination of industrial experience, leadership skills, and academic research equips me with a well-rounded perspective on real-world applications and cutting-edge advancements in robotics and autonomous systems.
My research interests include Visual and Semantic SLAM, Robotics and Computer Vision. Currently, I am focusing on Task-Driven SLAM to enable Long-Term Robot Autonomy.
I am seeking research internship positions for Summer and Fall 2026, with a focus on robotics and computer vision. I would be happy to discuss potential research opportunities or collaborations.
📝 Publications
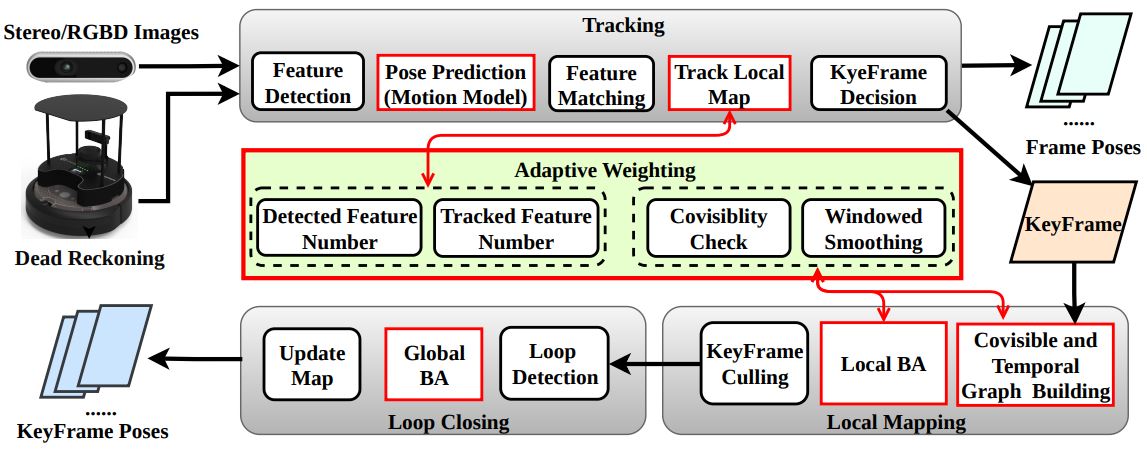
[Title] Good Weights: Proactive, Adaptive Dead Reckoning Fusion for Continuous and Robust Visual SLAM
[Author] Yanwei Du, Jing-Chen Peng, Patricio A. Vela.
[Description] The Good Weights algorithm described here provides a framework to adaptively integrate dead reckoning (DR) with passive visual SLAM for continuous and accurate frame-level pose estimation. Importantly, it describes how all modules in a comprehensive SLAM system must be modified to incorporate DR into its design. Adaptive weighting increases DR influence when visual tracking is unreliable and reduces when visual feature information is strong, maintaining pose track without overreliance on DR.
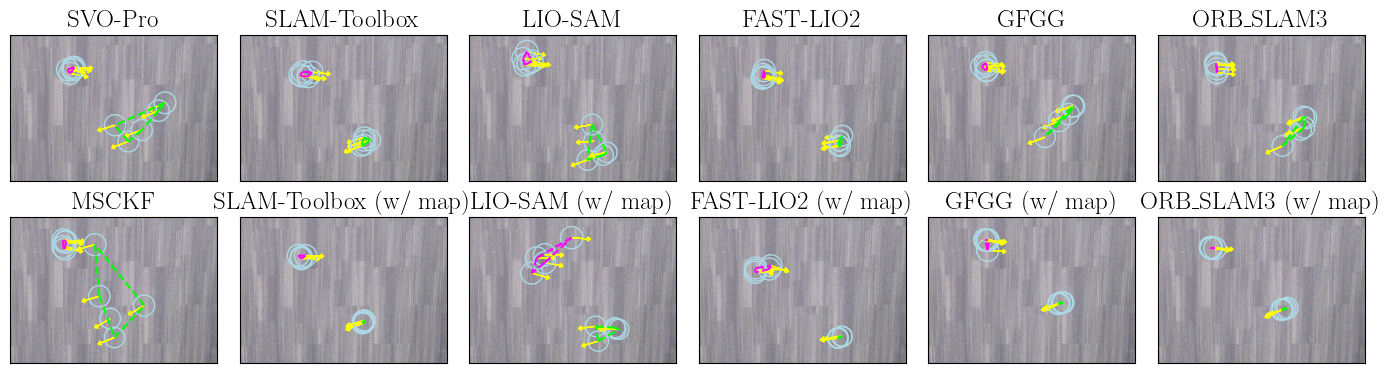
[Title] Task-Driven SLAM Benchmarking for Robot Navigation
[Author] Yanwei Du, Shiyu Feng, Carlton G. Cort, Patricio A. Vela.
[Description] We propose a benchmarking framework for evaluating SLAM methods. The framework accounts for SLAM’s mapping capabilities, employs precision as a key metric. The benchmarking approach offers a more relevant and accurate assessment of SLAM performance in task-driven applications.
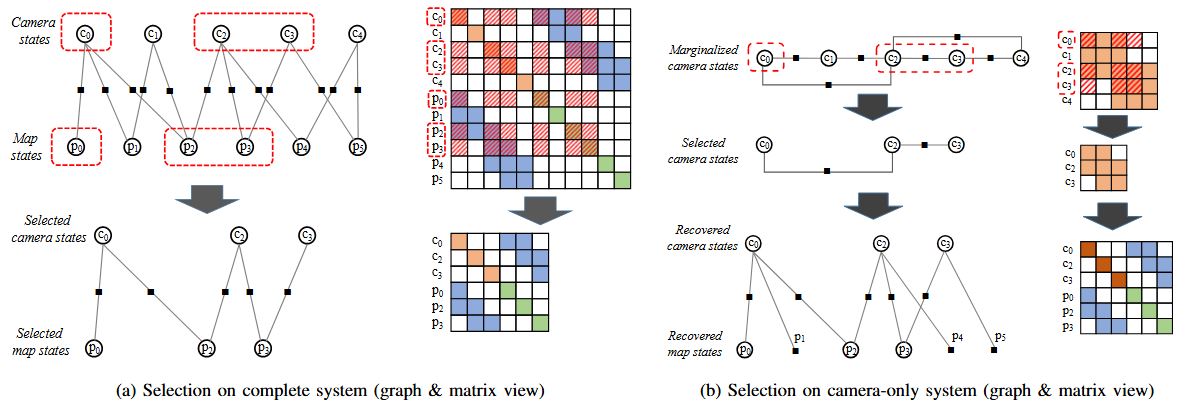
[Title] Good Graph: Budget-Aware Bundle Adjustment in Visual SLAM
[Author] Yanwei Du, Yipu Zhao, Justin S. Smith, Patricio A. Vela.
[Description] Good Graph is designed to address the critical challenge of computational cost in Visual SLAM back-end optimization. By intelligently capping the problem size while preserving the conditioning of the optimization, it ensures that the back-end remains efficient without sacrificing accuracy. This approach guarantees that the tracking thread receives an up-to-date and accurate map in real time, especially in budget-critical case, thereby enhancing both the accuracy and robustness of the overall Visual SLAM system.
[Title] A Stochastic Approach for Attack Resilient UAV Motion Planning
[Author] Nicola Bezzo, James Weimer, Yanwei Du, Oleg Sokolsky, Sang H. Son, Insup Lee.
[Description] In this paper we propose a stochastic strategy named Redundant Observable MDPs(ROMDPs) for motion planning of unmanned aerial vehicles (UAVs) subject to unreliable sensors measurements.
📝 Professional Projects
[Title] Visual-Inertial Odometry for Autonomous Driving
[Date] 2018.07 - 2019.07
[Role] Lead Software Engineer
[Description] The project is designed for autonomous driving vehicles in highway scenarios, where real-time, accurate and robust state estimation is a critical requirement. The system employs a fixed-lag smoothing using iSAM2 with the GTSAM library. The framework incorporates pre-integrated IMU and vehicle speed measurements, addressing the limitations of vision-only systems. It also includes an OpenGL-based visualization tool for monitoring of feature tracks, landmarks, and vehicle trajectories, providing actionable insights into system performance.
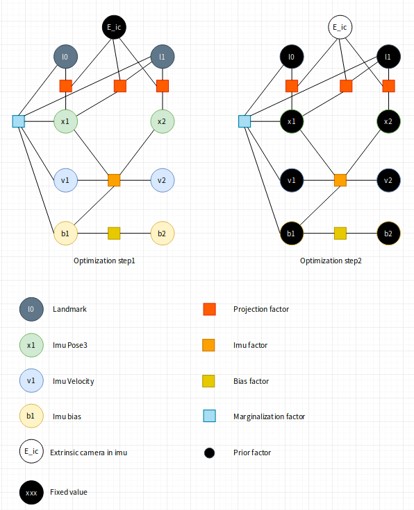
[Title] Online Camera-IMU Calibration for Autonomous Driving
[Date] 2018.07 - 2019.07
[Role] Lead Software Engineer
[Description] Designed an extrinsic-factor module for continuous camera–IMU calibration in a VIO system, improving long-term robustness and reliability. To mitigate observability limitations in VIO, extrinsic factors are actively monitored and gated during optimization to maintain globally consistent estimates.
📖 Education
- 2022.01 - now, PhD in Robotics, IRIM, Georgia Institute of Technology.
- 2012.09 - 2014.05, MS in Robotics, GRASP Lab, University of Pennsylvania.
- 2008.09 - 2012.07, BS in Mechanical Engineering, Northeastern University (CHINA).
💻 Work Experience
- 2017.07 - 2021.12, Senior Software Engineer, HoloMatic. Inc.
- 2016.06 - 2017.06, Software Engineer, Autonomous Driving Team, LeEco. Inc.
- 2015.08 - 2016.05, Research Engineer, Robotics Team, Institute of Deep Learning (IDL), Baidu. Inc.
- 2014.06 - 2015.07, Robotics Specialist, PRECISE Center, University of Pennsylvania.
💬 Research Statement
Simultaneous Localization and Mapping (SLAM) has long been a cornerstone of robotics research, with significant advancements focusing on achieving sub-millimeter accuracy in mapping and localization. However, for robots executing real-world tasks, Repeatability, Reliability, and Task Success take precedence over absolute accuracy. This shift in focus necessitates a paradigm change in SLAM research: from accuracy-driven designs to task-driven SLAM systems tailored to specific robotic applications.
My research direction lies in designing hierarchical, task-driven systems that dynamically adapt their performance to the demands of the task. This hierarchical design incorporates multiple estimation modules optimized for different objectives, including: 1) Topological Localization: Providing high-level, coarse-grained location estimates for efficient long-range navigation and situational awareness. 2) Local Environment Sensing: Offering detailed, localized feedback for tasks requiring high accuracy, such as obstacle avoidance or manipulation. By combining these modules, the system can achieve an adaptive balance between robustness and efficiency while maintaining bounded computational costs.
This task-driven SLAM framework is a step toward building robust, scalable systems capable of long-term autonomy. It ensures that the system’s design is inherently tied to the tasks it performs, allowing for practical, reliable operation across diverse environments and use cases. My research aims to explore and implement this novel paradigm, advancing the capabilities of robots to operate seamlessly in dynamic, task-oriented scenarios.